

【導讀】在無人機中,飛控系統(tǒng)是主要組成部分,而姿態(tài)增穩(wěn)控制則是對無人機順利執(zhí)行各項任務的有效方法。本文以實際應用為背景,詳細介紹了基于三軸陀螺和傾角傳感器構成全姿態(tài)增穩(wěn)控制系統(tǒng)的硬件實現(xiàn)及軟件設計,并將其運用在某型無人機中,針對系統(tǒng)中飛行姿態(tài)控制的的流程和內(nèi)環(huán)姿態(tài)控制的規(guī)律進行了詳細的分析與研究。
在無人機中,飛控系統(tǒng)是主要組成部分,而姿態(tài)增穩(wěn)控制則是對無人機順利執(zhí)行各項任務的有效方法。本文以實際應用為背景,詳細介紹了基于三軸陀螺和傾角傳感器構成全姿態(tài)增穩(wěn)控制系統(tǒng)的硬件實現(xiàn)及軟件設計,并將其運用在某型無人機中,針對系統(tǒng)中飛行姿態(tài)控制的的流程和內(nèi)環(huán)姿態(tài)控制的規(guī)律進行了詳細的分析與研究。經(jīng)過百余次試飛,基于三軸陀螺和傾角傳感器構成的姿態(tài)增穩(wěn)控制系統(tǒng),不僅滿足了現(xiàn)階段任務要求,還達到了良好的效果,為同類無人機的開發(fā)與研制提供了一套行之有效的方法。
系統(tǒng)特點
由陀螺和傾角傳感器構成全姿態(tài)增穩(wěn)控制回路。陀螺測量得到的角速度信息用作增穩(wěn)反饋控制,使飛機操縱起來變的更“遲鈍”一些,從而利用傾角傳感器測得飛機橫滾角和俯仰角。然后將陀螺測得的角速率信息和傾角傳感器測得的姿態(tài)角進行捷聯(lián)運算,得到融合后的姿態(tài)信息。這種較為復雜的捷聯(lián)算法可使姿態(tài)精度得到很大提高。
姿態(tài)增穩(wěn)控制律硬件設計
無人機姿態(tài)增穩(wěn)控制屬于內(nèi)回路控制,它包括姿態(tài)保持與控制、速度控制等模式。內(nèi)回路控制是在以三軸陀螺和傾角傳感器獲取無人機飛行姿態(tài)的基礎上,通過對升降舵、方向舵的控制,完成飛行姿態(tài)的穩(wěn)定與控制。內(nèi)回路控制作為飛行控制的核心回路,也是飛行高度、航跡等外回路控制的基礎。外回路控制是以GPS的位置、航向信號、高度傳感器的氣壓高度信號為基準的,它通過導航控制方法計算出飛行器的預定航線和實際航線。
無人機內(nèi)回路控制作為外回路控制的基礎,對其能否穩(wěn)定飛行起著至關重要的作用。該系統(tǒng)中,內(nèi)回路是由三軸陀螺和傾角傳感器構成的姿態(tài)增穩(wěn)控制回路。主要由主控制單片機、A/D采樣芯片、三軸陀螺儀和傾角傳感器組成。主控制單片機通過SPI串行總線與A/D采樣芯片相連,通過A/D采樣芯片獲得三軸陀螺儀的角速率與傾角傳感器的橫滾角和俯仰角,然后進行姿態(tài)信息融合,得到無人機俯仰和橫滾的姿態(tài)信息。主要接口連接情況如圖1所示。
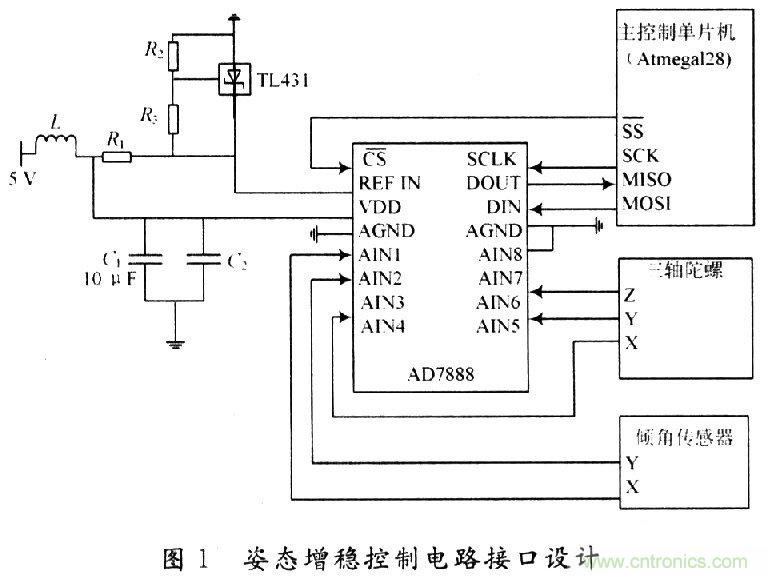
圖l中,AD7888是一款高速率、低功耗的12位模擬數(shù)字轉換器,能達到125 KSPS的傳輸速率,擁有8路模擬輸入通道。為片選引腳,該引腳有兩個作用,即啟動AD7888轉換器和制定串行數(shù)據(jù)的轉移,與單片機引腳PB0()相連。SCLK為串行時鐘輸入引腳,通過外接單片機ATmegal28引腳 PBl(SCK)提供串行時鐘信號。DIN為邏輯數(shù)據(jù)輸入端,DOUT為邏輯數(shù)據(jù)輸出端,分別與ATmegal28的引腳PB2(MOSI)和 PB3(MISO)相連。
外部基準電壓的范圍是Vref~VDD(Vref=1.2 V)。為了獲得穩(wěn)定的基準電壓,采用由TL431組成基準電壓電路。德州儀器公司(TI)生產(chǎn)的TL431是一個有良好熱穩(wěn)定性能的三端可調(diào)分流基準源。它的輸出電壓用電阻R2和R3就可以設置到從Vref=2.5 V到Vref=36 V范圍內(nèi)的任何值。
單片機ATmegal28與AD7888通過串行通信接口SPI相連,分別配置為主機和從機。SPI總線允許ATmegal28與外設之間進行高速的同步數(shù)據(jù)傳輸。
三軸陀螺主要用來測量無人機在飛行過程中俯仰角、橫滾角和偏航角的角速度,并根據(jù)角速度積分計算角度的改變。該系統(tǒng)中采用日本松下公司的EWTS82(以下簡稱S82),其原理是將旋轉時音叉震蕩產(chǎn)生的地球偏轉力(克里奧利力)轉換為電信號。該三軸陀螺由傳感器件、音叉驅動電路和信號處理電路構成。此款陀螺為一模擬器件,具有+80~-80(°)/s的測量范圍,單電源(+5 V DC)供電,對零點漂移抑制較好等優(yōu)點。另外,其低廉的價格可大大降低開發(fā)成本。
傾角傳感器采用芬蘭VTI Technologies公司生產(chǎn)的高精度雙軸傾角傳感器SCAl00T,該傳感器的體積小,重量輕。其內(nèi)部包含了一個硅敏感電容傳感器和一個ASIC專用集成電路,既具有內(nèi)部溫度測量及補償功能,又具備自檢測功能,單軸最大輸出范圍約為-40~+40 ℃,有效輸出范圍為-30~+30 ℃。當采樣頻率為8 Hz及以下時,可獲得0.002°的輸出分辨率。串行外圍接口SPI的輸出頻率為500 kHz,通過傳感器元件控制頻率響應,能夠承受大于20 000g的機械振動。它具有的主要特點是:x,y雙軸高分辨率雙向測量,單電源(+5 V DC)供電,工作電流?。? mA),噪聲低,工作溫度范圍寬(-40~+125 ℃)等。
姿態(tài)增穩(wěn)控制軟件設計
整個飛控系統(tǒng)的輸入量即為傳感器所采集的飛行狀態(tài)值,輸出量為飛機狀態(tài)方程的控制變量(舵值和發(fā)動機推力),所以飛控系統(tǒng)實質上是一個多通道的控制系統(tǒng),即多輸入/多輸出控制系統(tǒng)。其中,飛控系統(tǒng)的核心控制回路是以姿態(tài)角(俯仰角/滾轉角的)反饋信號為基礎構成的飛行姿態(tài)穩(wěn)定和控制回路,即內(nèi)回路。
在內(nèi)回路的基礎上,又引入高度保持、航跡控制等外回路。
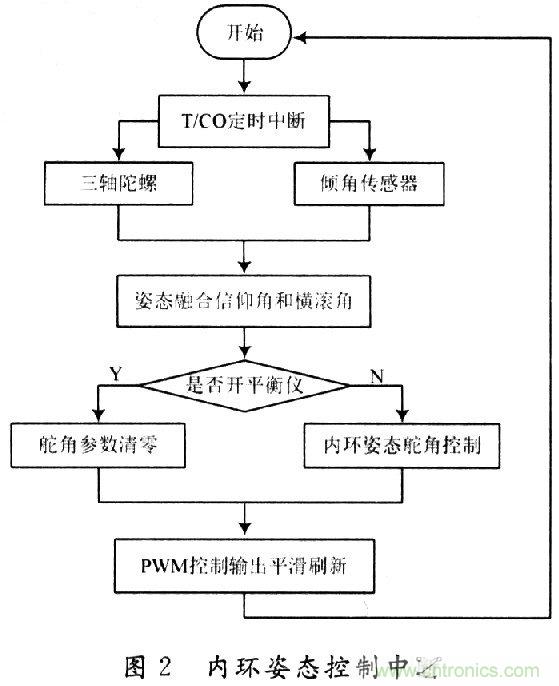
在飛控系統(tǒng)的姿態(tài)增穩(wěn)控制回路中三軸陀螺實時反饋飛機的俯仰、橫滾和偏航的角速率。另外,將三軸陀螺的俯仰角速率和橫滾角速率分別與傾角傳感器測得的俯仰角和橫滾角進行姿態(tài)捷聯(lián)解算。主控單片機利用定時/計數(shù)器O的定時中斷,間隔30 ms循環(huán)進行內(nèi)環(huán)的姿態(tài)控制,控制流程如圖2所示。由于飛機沿縱向平面的對稱性,無人機飛行控制可以分為相對獨立的縱向控制和橫側向控制通道。
(1)橫側向控制通道:無人機的橫側向運動即無人機的滾轉和偏航運動,主要通過副翼通道來實現(xiàn)。在橫側向控制通道中有滾轉角反饋和滾轉角速率反饋,這兩項構成了滾轉通道的核心回路——內(nèi)回路。另外,航向偏差反饋只有在無人機作定向直飛、航向跟蹤或者自主導航時才需要接人,以穩(wěn)定控制無人機的飛行航向;側偏距反饋僅當無人機進入自主導航時才需要接入,以控制無人機跟蹤預先設置的飛行航線;誤差積分反饋僅僅當無人機做定向直飛時才接入,以消除無人機左右不對稱性等因素的影響,改善無人機航向控制的精度以及左右轉彎的對稱性。
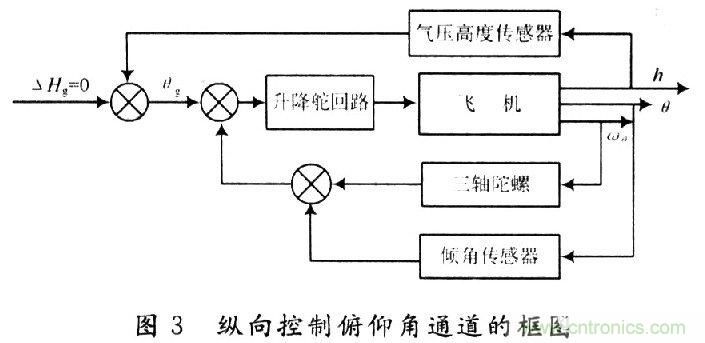
(2)縱向控制通道:無人機的縱向運動即指無人機的俯仰及升降運動。無人機的縱向運動規(guī)律是通過操縱無人機的升降舵來實現(xiàn)的。在縱向控制通道中有俯仰角反饋和俯仰角速率反饋,這兩項構成了縱向通道的核心控制回路——內(nèi)回路。另外,還有高度差反饋,只有在無人機做定高飛行時才需要接入,以穩(wěn)定無人機的飛行高度。縱向控制俯仰角通道的框圖如圖3所示。
通常可以把無人機飛行過程劃分為幾個相對獨立的航段。一個最基本的自主飛行工程可以劃分為6個航段:起飛階段、出航平飛階段、轉彎階段、返航平飛階段、盤旋階段和著陸階段。每個航段的任務相對獨立,把各航段的復雜飛行狀態(tài)分解為幾個基本的飛行任務:平飛、轉彎、升降等。這樣通過相對獨立的縱向控制通道和橫側向控制通道來協(xié)調(diào)實現(xiàn)無人機的平飛、轉彎、升降等基本飛行任務。
推薦閱讀:



