

【導(dǎo)讀】在技術(shù)支持過(guò)程中,常常遇到工程師質(zhì)疑放大器的增益帶寬積參數(shù)“摻水”啦?。。≡O(shè)計(jì)中明明預(yù)留很大余量,但是電路的輸出波形依然出現(xiàn)失真的情況。其實(shí),在交流信號(hào)調(diào)理電路的帶寬評(píng)估中,應(yīng)該區(qū)分對(duì)待輸入信號(hào)是小信號(hào),還是大信號(hào)。
在技術(shù)支持過(guò)程中,常常遇到工程師質(zhì)疑放大器的增益帶寬積參數(shù)“摻水”啦?。?!設(shè)計(jì)中明明預(yù)留很大余量,但是電路的輸出波形依然出現(xiàn)失真的情況。其實(shí),在交流信號(hào)調(diào)理電路的帶寬評(píng)估中,應(yīng)該區(qū)分對(duì)待輸入信號(hào)是小信號(hào),還是大信號(hào)。如果輸入信號(hào)是小信號(hào)使用增益帶寬積參數(shù)是合理的,而當(dāng)輸入信號(hào)為大信號(hào)時(shí),還使用增益帶寬積參數(shù)進(jìn)行評(píng)將會(huì)導(dǎo)致設(shè)計(jì)缺陷。本篇將通過(guò)一個(gè)實(shí)例分析,壓擺率與大信號(hào)帶寬(滿功率帶寬)的關(guān)系,以及一種快捷仿真滿功率帶寬的方式。
01、壓擺率定義
壓擺率(Slew Rate,SR)定義為由輸入大信號(hào)階躍變化引起的輸出電壓變化率,常用單位是 V/μs。如圖 2.125,在緩沖器電路的輸入端提供一個(gè)由最低輸入信號(hào)到最高輸入信號(hào)的階躍變化 Vin,放大器受到壓擺率參數(shù)的影響,輸出信號(hào) Vo 對(duì)于大信號(hào)的響應(yīng)以最快的變化速率(dV/dt)上升,直到輸出信號(hào)達(dá)到與輸入信號(hào)等幅值。
帶寬遇瓶頸:如何解決壓擺率問(wèn)題?")
圖 2.125 壓擺率參數(shù)工作示意圖
應(yīng)當(dāng)注意放大器上升、下降過(guò)程中的壓擺率可能不同,以及壓擺率參數(shù)的測(cè)試條件。如圖 2.126,在±5V 電源供電,增益為 1 倍的電路中,ADA4807 輸出 5V 階躍信號(hào)。在信號(hào)的上升沿,從峰值的 20%提高到 80%時(shí),壓擺率(SR+)為 225V/μs。在信號(hào)的下降沿,從峰值的 80%下降到 20%時(shí),壓擺率(SR-)為 250V/μs。

圖 2.126 ADA4807 動(dòng)態(tài)性能參數(shù)
在數(shù)據(jù)手冊(cè)中,沒(méi)有明確提供壓擺率參數(shù)的放大器,可以使用大信號(hào)瞬態(tài)響應(yīng)圖。如圖 2.127,估讀Δt、ΔV,按照壓擺率定義估算壓擺率的范圍。
帶寬遇瓶頸:如何解決壓擺率問(wèn)題?")
圖 2.127 ADA4807 大信號(hào)瞬態(tài)響應(yīng)
02、壓擺率與滿功率帶寬的關(guān)系
雖然在數(shù)據(jù)手冊(cè)中可以獲得壓擺率參數(shù),但是在工程師設(shè)計(jì)中最終需要的是大信號(hào)帶寬,即滿功率帶寬(Full Power Bandwidth,F(xiàn)PBW)。它是指放大器在指定閉環(huán)增益與指定負(fù)載的條件下,輸入正弦波時(shí),輸出為指定最大幅度,在此狀態(tài)下增大輸入信號(hào)的頻率直到輸出信號(hào)因?yàn)閴簲[率限制導(dǎo)致失真的頻率點(diǎn)。
滿功率帶寬的計(jì)算過(guò)程如下:
輸入信號(hào)是峰峰值為 Vpp,頻率為 f 的正弦波,通過(guò)單位增益電路的輸出電壓為式 2-75。
輸出電壓對(duì)時(shí)間求導(dǎo),得到式 2-76。
當(dāng) dv/dt 達(dá)到最大時(shí),函數(shù)式為 2-77。
帶寬遇瓶頸:如何解決壓擺率問(wèn)題?")
式中 MAX 表示在函數(shù) cos 等于 1 的時(shí)候取得最大值。即在 Sin 信號(hào) t =0 時(shí)的壓擺率值。此時(shí),對(duì)應(yīng)的信號(hào)頻率就是滿功率帶寬,式 2-77 變換為式 2-78。

由式 2-78,調(diào)整為滿功率帶寬的函數(shù)式,如式 2-79。
帶寬遇瓶頸:如何解決壓擺率問(wèn)題?")
可見(jiàn),滿功率帶寬由壓擺率和信號(hào)峰峰值決定。當(dāng)壓擺率為常數(shù)時(shí),信號(hào)峰峰值越大,滿功率帶寬越小。如圖 2.126,ADA4807 的上升壓擺率為 225V/μs,當(dāng)輸入信號(hào)峰峰值為 2V 時(shí),其滿功率帶寬為 17.9MHz。當(dāng)信號(hào)峰峰值為 4V 時(shí),其滿功率帶寬僅為 8.95MHz。所以在大信號(hào)作輸入激勵(lì)的 ADA4807 應(yīng)用電路中,仍然使用增益帶寬積(-3dB 帶寬為 180MHz)進(jìn)行設(shè)計(jì),必然會(huì)導(dǎo)致電路輸出信號(hào)失真。
03、壓擺率與滿功率帶寬實(shí)例分析
去年 4 月中旬,筆者接觸到一位剛剛成立工作室的工程師,在首款產(chǎn)品研發(fā)中,將 AD8065 設(shè)計(jì)為電路第二級(jí)的緩沖器,調(diào)試中發(fā)現(xiàn)輸出信號(hào)產(chǎn)生失真。
電路如圖 2.136,輸入信號(hào)是幅值為±0.1~±1V ,頻率為 10~30MHz 的正弦波,工程師反饋在輸入信號(hào)為±1V,信號(hào)頻率超過(guò) 20MHz 時(shí),AD8065 的輸出信號(hào)會(huì)產(chǎn)生失真。如圖 1,工程師對(duì)比過(guò) AD8065 的 -3dB 信號(hào)帶寬為 145MHz 沒(méi)有發(fā)現(xiàn)異議。

圖 1 AD8065 動(dòng)態(tài)性能參數(shù)
筆者向工程師解釋問(wèn)題在于±0.1~±1V 的信號(hào)屬于大信號(hào)范圍,應(yīng)該使用壓擺率計(jì)算全功率帶寬的方法進(jìn)行評(píng)估。AD8605 在±5V 供電,輸入信號(hào)峰峰值為 2V,滿功率帶寬為:

該問(wèn)題如果工程師在方案選型階段使用 LTspice 進(jìn)行仿真完全可以暴露設(shè)計(jì)漏洞,規(guī)避壓擺率限制問(wèn)題,高效優(yōu)質(zhì)地完成硬件設(shè)計(jì)工作。如圖 2.136,將信號(hào)源 V3 設(shè)置為正弦波,峰峰值為 2V,頻率設(shè)置可變參量 f,變化范圍是 10~30MHz,以 4MHz 為步長(zhǎng)。
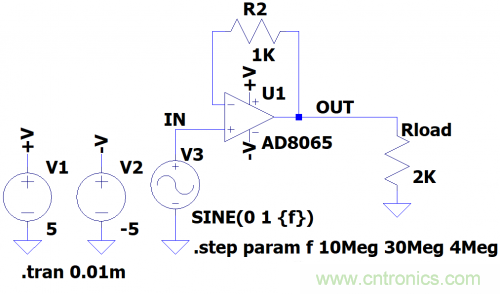
圖 2.136 AD8605 緩沖電路
AD8065 的輸出信號(hào)對(duì)比輸入信號(hào)的仿真結(jié)果,如圖 2.137。當(dāng)輸入信號(hào)頻率為 10MHz、14MHz 時(shí),輸出完全跟隨輸入;當(dāng)信號(hào)頻率為 18MHz 時(shí),其輸出稍有失真;當(dāng)信號(hào)頻率為 22MHz 時(shí),其輸出明顯失真;當(dāng)信號(hào)頻率為 26MHz、30MHz 時(shí),其輸出受壓擺率限制完全失真成為三角波,斜率為壓擺率。

圖 2.137 AD8065 緩沖電路的滿功率帶寬仿真結(jié)果
將電路中 AD8065 替換為筆者推薦的 ADA4817,再次進(jìn)行仿真。如圖 2,數(shù)據(jù)手冊(cè)中,提供了 ADA4817 在±5V 供電,4V 階躍的條件下,壓擺率典型值為 870V/μs,以及輸入信號(hào)為 3.3V,電路增益為 2 倍時(shí)滿功率帶寬典型值為 60MHz。
帶寬遇瓶頸:如何解決壓擺率問(wèn)題?")
圖 2 ADA4817 動(dòng)態(tài)性能參數(shù)
結(jié)果如圖 2.138,輸入正弦信號(hào)峰值為±1V,在頻率為 10~30MHz 范圍內(nèi),輸出信號(hào) V(out)完全跟隨與輸入信號(hào) V(in)變化而變化,沒(méi)有再發(fā)生失真現(xiàn)象。
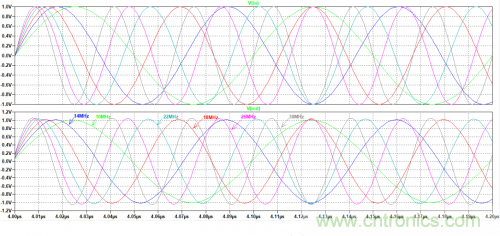
圖 2.138 ADA4817 緩沖電路的滿功率帶寬仿真結(jié)果
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)電話或者郵箱聯(lián)系小編進(jìn)行侵刪。




