

【導(dǎo)讀】當(dāng)我們在聽一首歌時,我們把正弦波形看作音樂。它們的振幅告訴我們信號有多大,頻率告訴我們聲音是低音還是高音。然而,第三個重要參數(shù),即相位,我們的耳朵是感覺不到的。本文將解釋并給出更多關(guān)于相位參數(shù)的細(xì)節(jié),因此,第一節(jié)將介紹相位和相位差的概念。在第二部分,我們詳細(xì)介紹了相移概念的更多方面,并著重討論了當(dāng)信號不存在時的特定情況同步化了第三節(jié)和最后一節(jié)將最后介紹相位差在干涉現(xiàn)象中的重要作用。
演示
正弦信號的相位通常用Φ表示,并以弧度(rad)或度數(shù)(°)測量,可以在-π和+πrad或-180°和+180°之間變化。在圖表中,交流信號的相位表示其相關(guān)正弦函數(shù)在時間原點的初始狀態(tài):
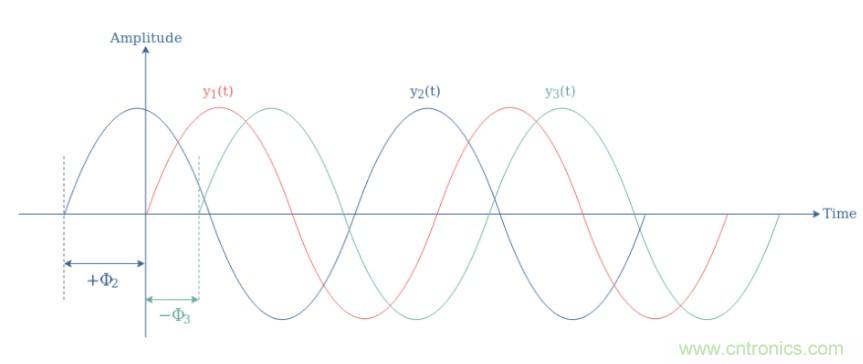
圖1:具有不同相位的三個正弦波的圖示
一個信號的相位Φ可以有三種不同的性質(zhì),它決定了波形繞縱軸的位置:
等于0(°或rad),例如用作參考信號的信號y1(t)
如信號y2(t)為正
如信號y3(t)為負(fù)
單個信號的相位不是很相關(guān),因為無論交流波形是電的還是機(jī)械的,如果信號有相位,感知將保持不變。更重要的是,可以清楚地感知到的是相位差,也稱為相同頻率的兩個信號之間的相移。
相位差
在相同頻率的信號之間重要的是在這一節(jié)中我們只討論兩個頻率相同的信號之間的相移。因此,考慮具有不同相位和可能不同振幅的兩個相同頻率的信號:y1(t)=Asin(ωt+Φ1)和y2(t)=Bsin(ωt+Φ2)。我們將相位差定義為ΔΦ21=Φ2-Φ1。在圖1中,我們有ΔΦ21=+Φ2,ΔΦ31=-Φ3,以及ΔΦ32=-Φ3-Φ2。正相位差,如ΔΦ21,表明信號y2(t)暫時先于參考信號y1(t),我們也認(rèn)為y2(t)超前于y1(t)。負(fù)相位差,如ΔΦ31和ΔΦ32,表明信號y3(t)跟隨信號y1(t)和y2(t),我們也說y3(t)滯后于y1(t)和y2(t)。在相位差可以取的-180°和+180°或-π和+πrad之間的所有值中,可以突出顯示幾個,如下圖2所示:
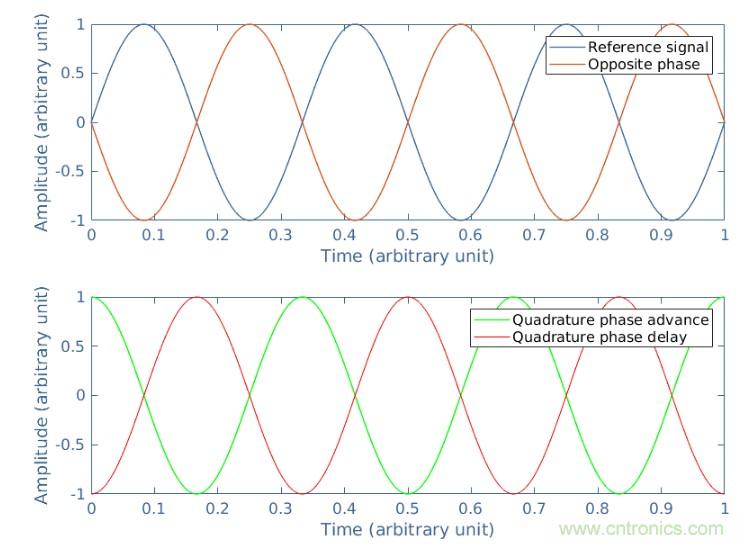
圖2:一些相關(guān)相移的圖示
相反相的特征是相移為+180°或+πrad,這與-180°或-πrad完全相同。如果參考信號為Vref=vrefsin(ωt),則相反的信號為Vopp=vrefsin(ωt+π)=-vrefsin(ωt),因此,Vref+Vopp=0。正交信號的特征是“前進(jìn)”的相移為+90°或+π/2 rad,對于“延遲”,相移為-90°或-π/2 rad,我們特別關(guān)注電流(I)和電壓(V)信號在電偶極子上的相移,并研究其影響電源。輸入直流區(qū),偶極子的耗散功率(P)由電壓和電流的乘積給出:
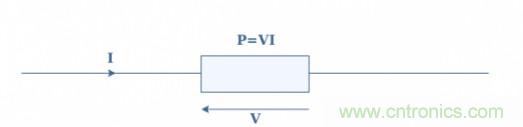
在交流系統(tǒng)中,這種表示不再是真實的,因為電壓和電流都是交替的??紤]偶極子的電壓為V=Vrms√2.sin(ωt),相同頻率的電流呈現(xiàn)+ΔΦ:I=Irms√2.sin(ωt+Φ)。以Vrms和Irms為均方根值。它可以證明,交流區(qū)偶極子中耗散的有功功率由公式1給出:
公式1:交流狀態(tài)下的耗散功率
cos(Φ)這個術(shù)語被稱為功率因數(shù),它給出了受體吸收電源功率的效率。這個因子是一個介于0和1之間的實數(shù),這兩個極值反映了截然不同的行為:如果cos(Φ)=1,偶極子被認(rèn)為是純電阻,電壓和電流之間的相移為零。偶極子不存在任何感應(yīng)或電容行為。如果cos(Φ)=0偶極子是純無功的,電壓和電流之間的相移最大,等于±90°或±π/2 rad。在這種情況下,偶極子不消耗任何功率,而是將其返回給電路。The方程式1中給出的功率稱為有功功率(P),Vrms×Irms的乘積稱為視在功率,并記下S。如果元件為純電阻元件,則為消耗的功率。Vrms×Irms×sin(Φ)是無功功率,并注明Q。由于在同一復(fù)雜功率圖中相移ΔΦ,這些量可以聯(lián)系起來:
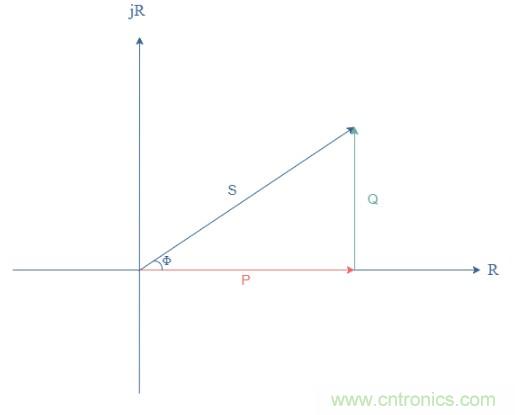
圖3:有功、視在和無功功率的定義
在本節(jié)中,我們考慮兩個頻率相近但不完全相同的信號y1(t)和Φ的相移y2(t):ω1≠ω2。通常,只能為兩個頻率相同的信號定義相移,但在這種特殊情況下,由于頻率相似,定義相位差仍然有意義。如果頻率相差太大,通常當(dāng)ω1>2ω2時,由于相位差和信號一樣變化,因此定義它是沒有意義的本身。在在信號頻率相似的情況下,相位差不再是常數(shù),而是隨時間緩慢變化:ΔΦ(t)=(ω2-ω1)t+Φ。這兩個信號的疊加很有趣,因為會產(chǎn)生拍頻現(xiàn)象,如圖4所示:
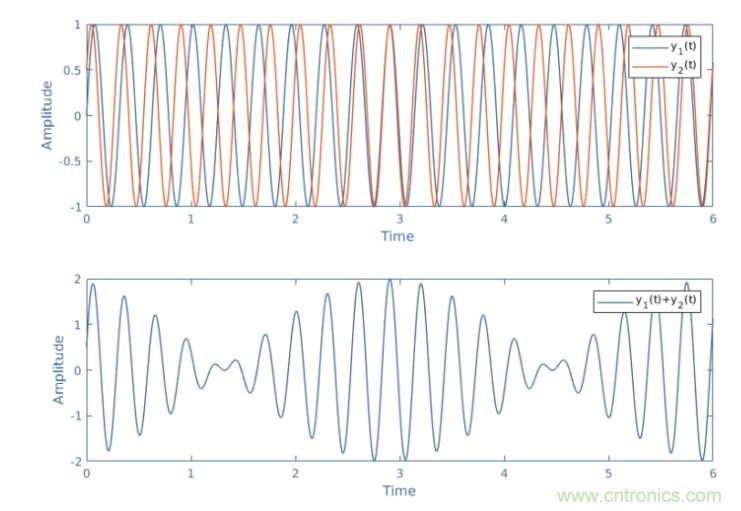
圖4:兩個頻率相近信號之間跳動現(xiàn)象的圖示
干擾
我們可以在圖4中看到,正弦波形的疊加有時除了信號處于相位時的振幅之外,有時會導(dǎo)致相距,或者當(dāng)信號與相位相反時進(jìn)行減法。這種現(xiàn)象被稱為干擾,當(dāng)信號相同時發(fā)生頻率。考慮同樣頻率的正弦波形又有兩種:y1(t)=A1sin(ωt+Φ1)和y2(t)=A2sin(ωt+Φ2)。我們把y3(t)稱為疊加y1(t)+y2(t)和A3的振幅??梢钥闯觯瑈3(t)的振幅滿足以下公式:

公式2:疊加信號的振幅
我們可以注意到y(tǒng)1(t)和y2(t)之間的相位差對最終的信號幅度起著重要的作用。有兩種情況值得注意:ΔΦ12=0,信號同相,振幅A3最大,滿足A32=(A1+A2)2。在這種情況下,我們認(rèn)為y1和y2之間的干擾是建設(shè)性的,ΔΦ12=±πrad,信號相位相反,振幅A3最小,滿足A32=(A1-A2)2。在這種情況下,y1和y2之間的干擾是破壞性的。什么時候相位差在這兩個極值之間,我們可以繪制一個圖表,顯示A3隨ΔΦ12的變化:
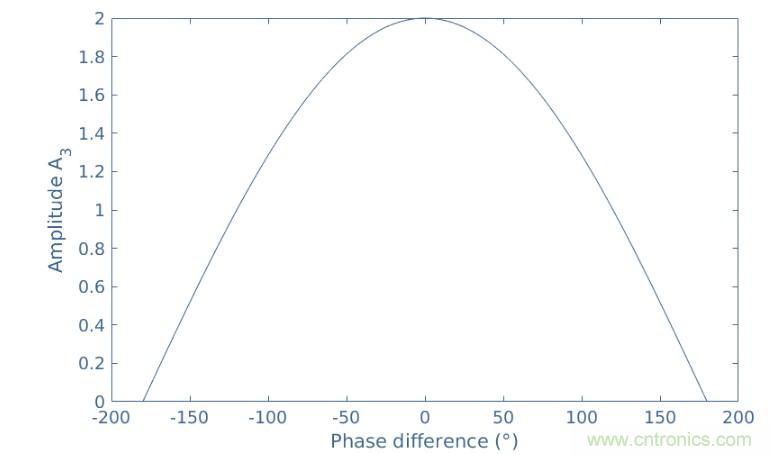
圖5:作為相位差函數(shù)的結(jié)果信號的振幅
在這個圖中,為了簡單起見,我們選擇A1=A2。我們又可以看到,當(dāng)ΔΦ12=0,A3=A1+A2=2,當(dāng)ΔΦ12=±180°時,A3=A1-A2=0。
結(jié)論
本教程詳細(xì)介紹了相位和相位差的概念,并通過一些例子指出了相位和相位差的重要性示例。首先總之,我們給出了什么是信號的相位,以及用什么單位來測量。然而,僅僅是相位的概念并不十分相關(guān),在第二節(jié)的第一段中,我們定義了相移ΔΦ,并給出了一些與相位差的特殊情況相關(guān)的詞匯:同相(ΔΦ=0°),相位的對立(ΔΦ=±180°)和正交(ΔΦ=±90°)。在第二小節(jié)中,我們強(qiáng)調(diào)了電路中電流和電壓之間相移的重要性。在任何電子元件中消耗的功率與相移的余弦成正比,稱為功率系數(shù)。最后一節(jié),我們將干涉現(xiàn)象與相移參數(shù)聯(lián)系起來并加以解釋。
推薦閱讀:




