
【導(dǎo)讀】激光傳感器是利用激光技術(shù)進(jìn)行測量的傳感器,一般是由激光器,光學(xué)零件,和光電器件所構(gòu)成的,它能把被測物理量(如長度,距離,振動,流量,速度等)轉(zhuǎn)換成光信號,然后應(yīng)用光電轉(zhuǎn)換器把光信號變成電信號,通過相應(yīng)電路的過濾,放大,整流得到輸出信號,從而算出被測量。
在工業(yè)自動化中,激光測距傳感器是最常見的傳感器之一。不過,您對它真的了解嗎?本文將讓您一文了解它的原理、選型和應(yīng)用。
激光傳感器是利用激光技術(shù)進(jìn)行測量的傳感器,一般是由激光器,光學(xué)零件,和光電器件所構(gòu)成的,它能把被測物理量(如長度,距離,振動,流量,速度等)轉(zhuǎn)換成光信號,然后應(yīng)用光電轉(zhuǎn)換器把光信號變成電信號,通過相應(yīng)電路的過濾,放大,整流得到輸出信號,從而算出被測量。
相比超聲波、紅外、毫米波等其他傳感器,激光傳感器無論在測量精度、分辨率,還是抗干擾能力、穩(wěn)定性、反應(yīng)速度都具有不可比擬的優(yōu)勢。所以,在測量精度要求較高,比如0.1mm,0.01mm,甚至1um的情況下,激光傳感器往往都是首選。
激光傳感器工作原理
在工業(yè)領(lǐng)域,最常見的激光傳感器是激光位移傳感器,也稱為激光測距傳感器,可精確非接觸測量被測物體的位置、位移等變化,主要應(yīng)用于檢測物體的位移、厚度、振動、距離、直徑等幾何量的測量。
按照測量原理,激光位移傳感器原理分為激光三角測量法和激光回波分析法,激光三角測量法一般適用于高精度、短距離的測量,而激光回波分析法則用于遠(yuǎn)距離測量,下面分別介紹激光位移傳感器原理的兩種測量方式。
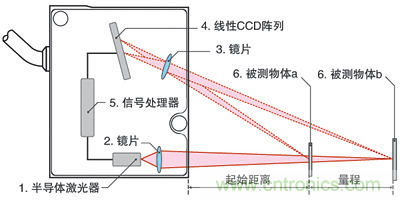
01,三角測量法
激光發(fā)射器通過鏡頭將可見紅色激光射向被測物體表面,經(jīng)物體表面散射的激光通過接收器鏡頭,被內(nèi)部的CCD線性相機(jī)接收,根據(jù)不同的距離,CCD線性相機(jī)可以在不同的角度下“看見”這個(gè)光點(diǎn)。根據(jù)這個(gè)角度及已知的激光和相機(jī)之間的距離,數(shù)字信號處理器就能計(jì)算出傳感器和被測物體之間的距離。
同時(shí),光束在接收元件的位置通過模擬和數(shù)字電路處理,并通過微處理器分析,計(jì)算出相應(yīng)的輸出值,并在用戶設(shè)定的模擬量窗口內(nèi),按比例輸出標(biāo)準(zhǔn)數(shù)據(jù)信號。如果使用開關(guān)量輸出,則在設(shè)定的窗口內(nèi)導(dǎo)通,窗口之外截止。另外,模擬量與開關(guān)量輸出可獨(dú)立設(shè)置檢測窗口。
采取三角測量法的激光位移傳感器最高線性度可達(dá)1um,分辨率更是可達(dá)到0.1um的水平。
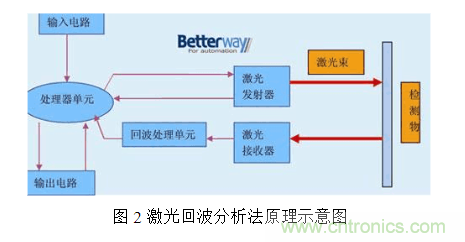
02,回波分析法
激光位移傳感器采用回波分析原理來測量距離以達(dá)到一定程度的精度。傳感器內(nèi)部是由處理器單元、回波處理單元、激光發(fā)射器、激光接收器等部分組成。激光位移傳感器通過激光發(fā)射器每秒發(fā)射一百萬個(gè)激光脈沖到檢測物并返回至接收器,處理器計(jì)算激光脈沖遇到檢測物并返回至接收器所需的時(shí)間,以此計(jì)算出距離值,該輸出值是將上千次的測量結(jié)果進(jìn)行的平均輸出。即所謂的脈沖時(shí)間法測量的。激光回波分析法適合于長距離檢測,但測量精度相對于激光三角測量法要低,最遠(yuǎn)檢測距離可達(dá)250m。
如何選擇激光傳感器
我們建議大家注意以下三點(diǎn):
01,注意被測物結(jié)構(gòu)和材料
通常激光位移傳感器測量需要完整的三角光路。被測物如果有深槽或復(fù)雜表面,可能會導(dǎo)致三角光路被遮擋,從而無法測量。還有一些吸光材料,如黑色橡膠等材料,大部分光強(qiáng)會被吸收,這時(shí)需要合理調(diào)節(jié)曝光時(shí)間以獲得足夠測量信號。另外反光很強(qiáng),或鏡面反射被測物,可能會導(dǎo)致光線垂直返回而沒有形成漫反射,也會導(dǎo)致測量效果不佳。所以使用激光位移傳感器時(shí),一定要先與廠家充分溝通,不要想當(dāng)然認(rèn)為可以測,結(jié)果卻不好。
02,根據(jù)需要選擇適用的參數(shù)指標(biāo)
常用于選擇激光位移傳感器的指標(biāo)包括傳感器的精度,或者叫線性度、絕對誤差等,指的是傳感器的測量值偏離理論真實(shí)值的偏差程度,這個(gè)參數(shù)直接反應(yīng)測得準(zhǔn)不準(zhǔn)。第二個(gè)就是分辨率,這個(gè)參數(shù)指傳感器做出示數(shù)變化所需要的最小位移變化量,通常分辨率參數(shù)值要小于精度。第三個(gè)是測量速度,測量速度直接決定測量是否可以跟得上被測物的變化速度,能否完整反應(yīng)位移變化的全過程。對測量速度要求高的場合常見于振動測量。當(dāng)然除此以外,還有很多參數(shù)可以決定傳感器的性能,包括能夠承受環(huán)境溫度指標(biāo),能夠承受的振動和沖擊指標(biāo)等。
03,品牌的選擇
激光位移傳感器國內(nèi)外廠商眾多,產(chǎn)品質(zhì)量、精度和分辨率差別也很大。國外知名品牌質(zhì)量好但價(jià)格也很高,而國內(nèi)小廠的價(jià)格不高但穩(wěn)定性方面又不能保證。所以選擇國內(nèi)廠商中的知名品牌是一個(gè)最好的選擇,不僅可以實(shí)現(xiàn)國產(chǎn)化替代,也可以保證產(chǎn)品的可靠性、穩(wěn)定性、精度等關(guān)鍵質(zhì)量指標(biāo)。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請電話或者郵箱聯(lián)系小編進(jìn)行侵刪。



